Nos réalisations de cartes électroniques
Carte Boost 5V vers 24V
Application: alimentation de produits industriels 24V à partir d’un Port USB Type C
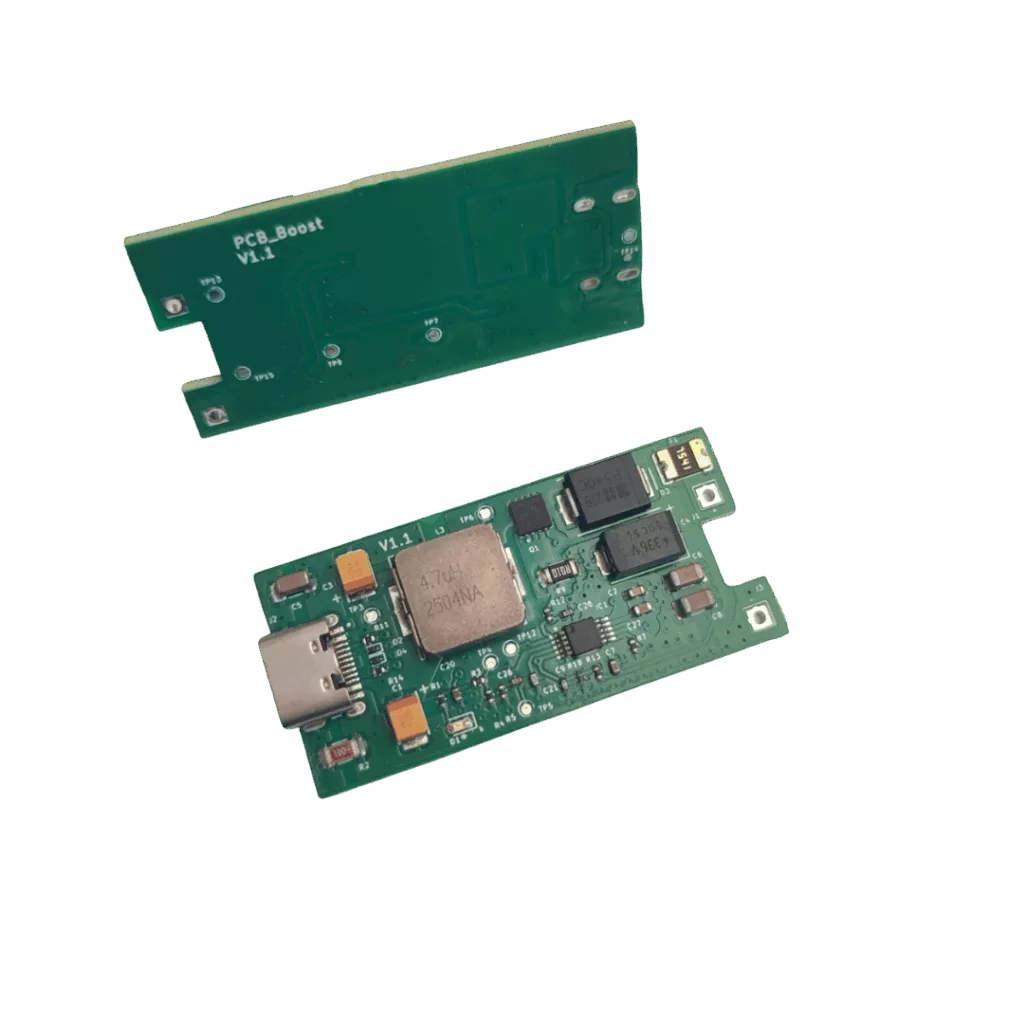
- Interface d’entrée USB C / compatible USB A
- Intégration d’un contrôleur Boost TI (mode Switching)
- Puissance de sortie max 10W
- Réalisation complet du design: schéma + layout (2 couches)
- Outil de Design Kicad
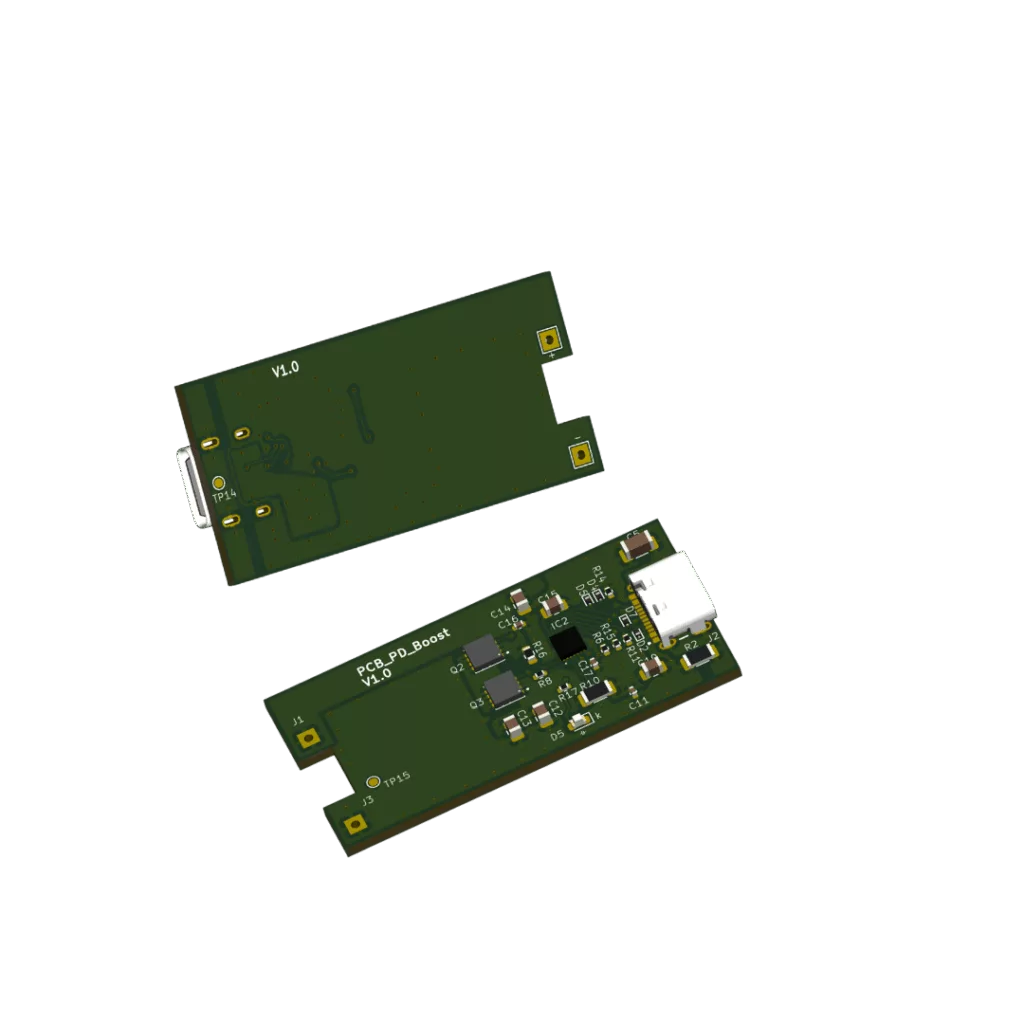
Carte USB Type C Power Delivery 3.0
Application: alimentation de produits +12V à partir d’un Port USB Type C PD3.0
- Interface d’entrée USB C
- Intégration d’un contrôleur PD3.0/PPS sink ( Diode Inc ou Hynetek)
- Tension de sortie supportée: 12V
- Courant de sortie supporté: 2A
- Réalisation complet du design: schéma + layout (2 couches)
- Outil de Design Kicad
Carte contrôleur d’accès
Application: gateway de contrôle d’accès de bâtiment

- Alimentation 12V ou 24V ou PoE
- Intégration d’un Compute Module 4
- Interface Rex, RS485, contact sec
- Interface Ethernet avec PoE+
- Réalisation du schéma
- Outil de Design Altium
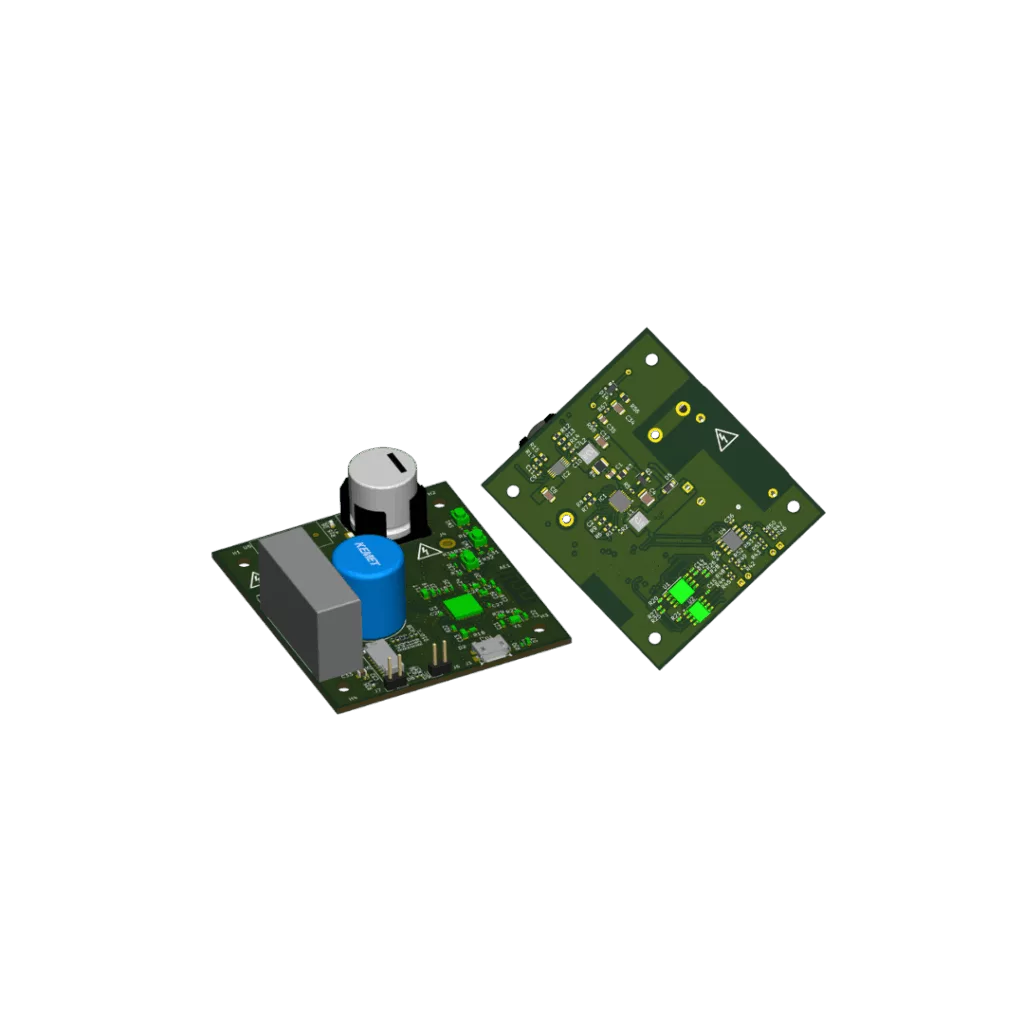
Carte iot Wifi avec acquisition courant & température
Application: monitoring du courant & température de produits industriels
- Alimentation 230VAC
- Intégration d’un ESP32 S3 avec antenne PCB
- Acquisition analogique de la température (capteur déporté PT1000)
- Acquisition du courant consommé sur secteur
- Réalisation du routage ( 4 couches)
- Outil de Design Kicad
Développement firmware & logiciel
portage driver HUSB238a sur STM32F401 (langage c)
Application: intégration dans un produit pour le rendre compatible avec le protocole Power Delivery 3.0
- Développement sous ST32CubeIDE
- Interface I2C
- Test intégration réaliser sur Carte STM32Nucleo
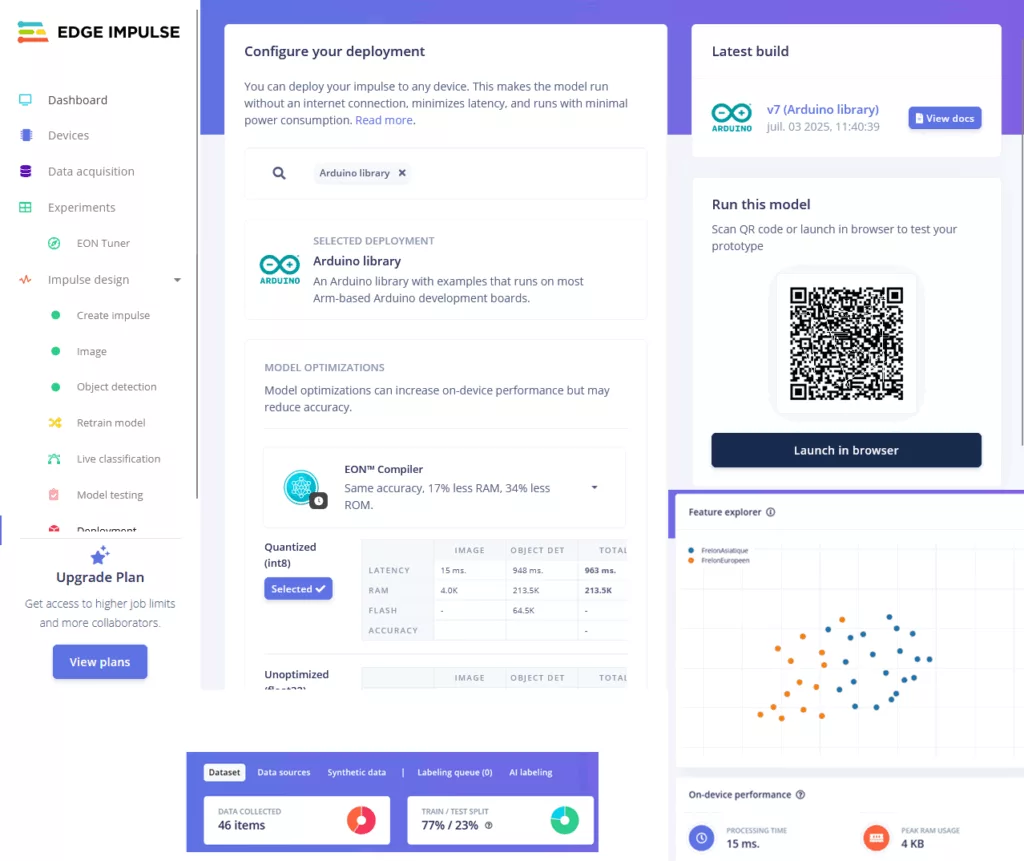
Détection et différenciation d’ojets avec IA sur ESP-Eye
Application: détecter et différencier les insectes dans une application de piégeages
- Utilisation de EDGE IMPULSE pour la partie IA ( FOMO MobileNetV2 0.1)
- Intégration du modèle sur ESP32 – module ESP-EYE devkit
- Entrainement et test du modèle
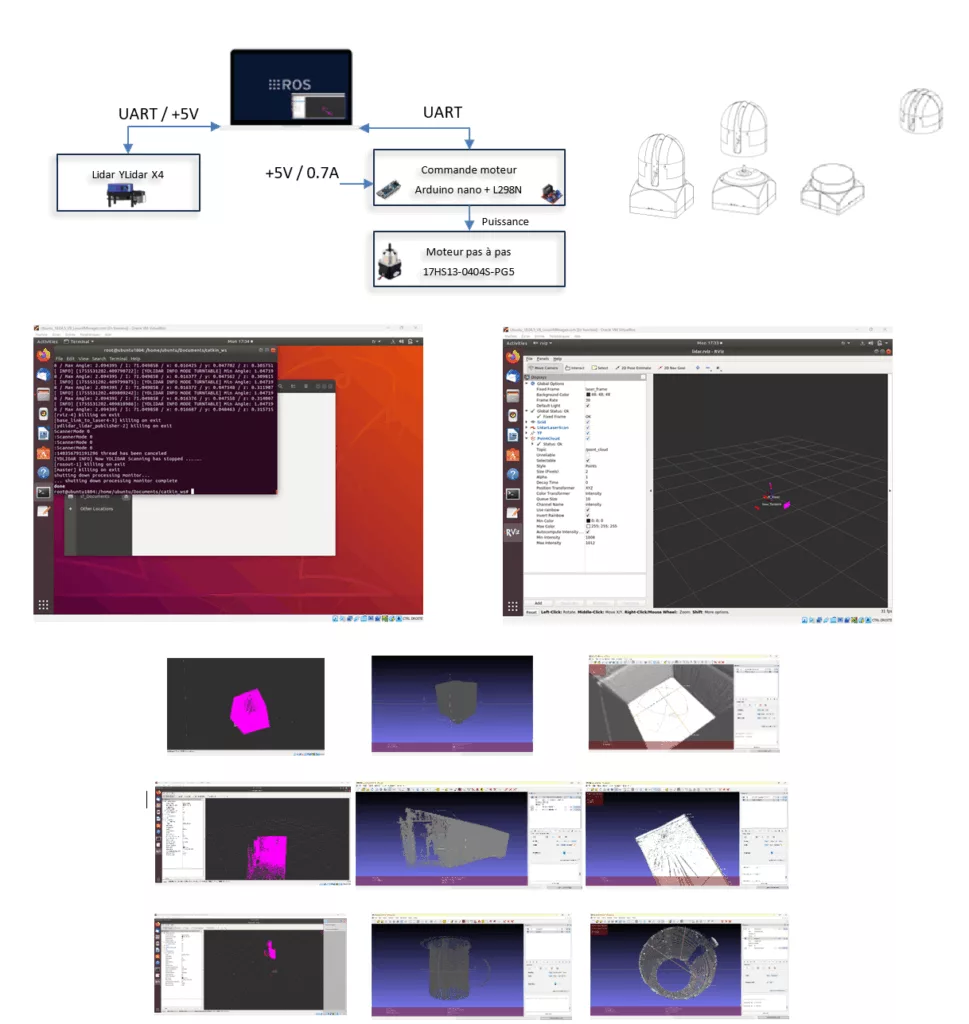
Réalisation d’un scanner 3d lidar multi fonctions
Application: scanner Lidar 3D permettant de scanner un environnement et un objet
- Développement du firmware sur Arduino nano Every (commande moteur pas à pas)
- Intégration du Lidar X4 – YDLIDAR
- Intégration de l’acquisition et traitement du nuage de point sous ROS (Ubuntu)
- Conversion du nuage de point en surface maillé via Meshlab
- Dépôt d’un Modèle auprès de l’INIPI